







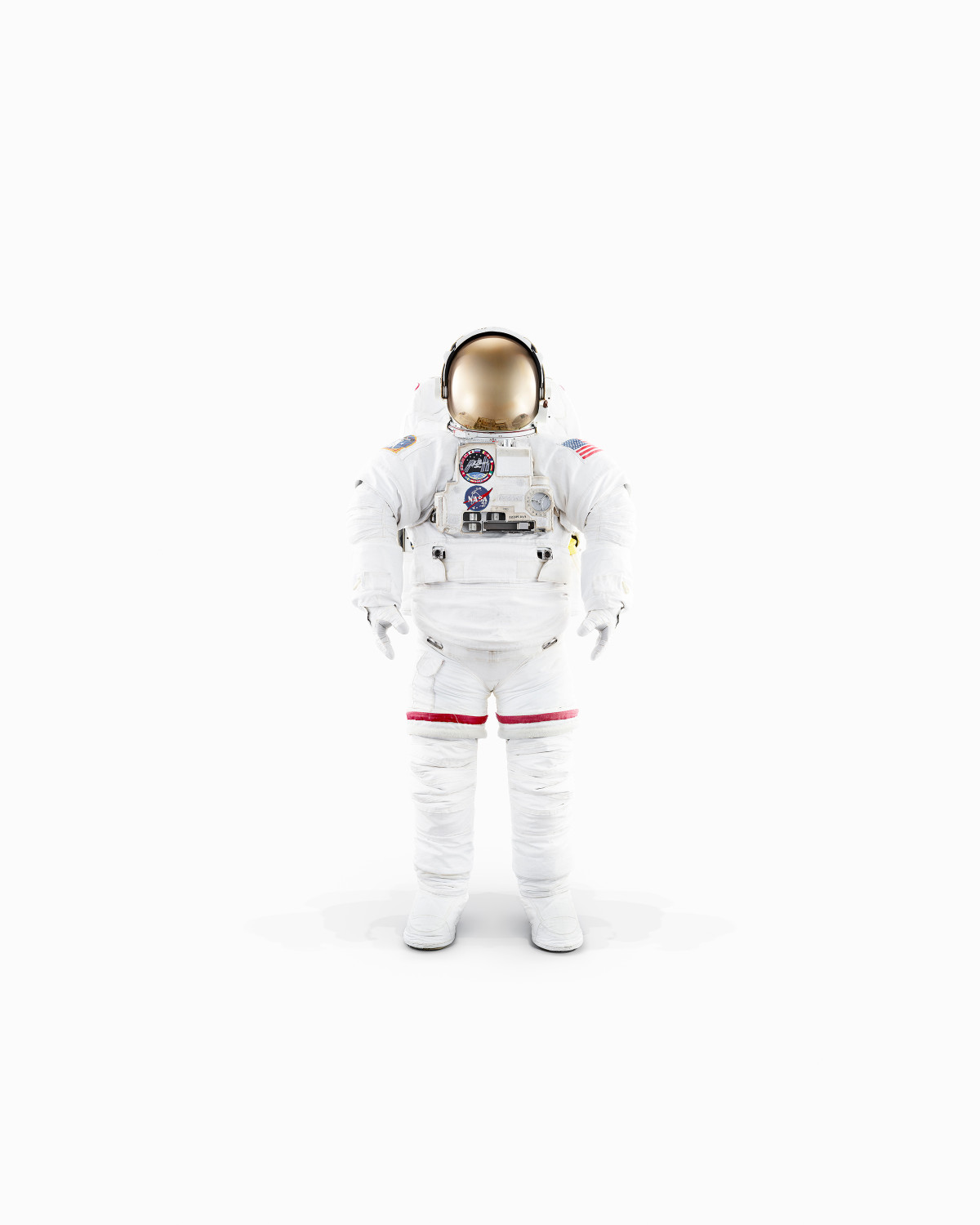
Костюм для выхода в открытый космос EMU
Скафандр EMU (Extravehicular Mobility Unit для выхода в открытый космос разработан в NASA в 1981 году. Он представляет собой двухсекционный полужесткий костюм и сейчас остается одним из двух рабочих типов скафандров для выхода в открытый космос. Используется в том числе на Международной космической станции (МКС) (второй тип скафандра — российский «Орлан-МК»).
Основные особенности американской разработки: он жестче и тяжелее отечественного, оборудован видеокамерой и литровой емкостью с с водой, подключенной трубкой к шлему, а корпус может выдерживать температуры от минус 184 до плюс 149 градусов Цельсия. Костюм весит 145 кг, в нем можно работать в космосе до восьми часов.

Многоцелевой пилотируемый корабль «Орион»
Закрыв лунную программу в 1975 году, США решили вернуться на Луну вновь в начале 2000-х. «Орион» разрабатывался в рамках программы «Созвездие» для полетов к Луне и доставки людей и грузов на МКС. Предполагается, что в будущем он сможет высадить человека на Марс.
Разработка «Ориона», которую осуществляет компания Lockheed Martin, до сих пор до конца не завершена, хотя первый беспилотный испытательный полет прошел 5 декабря 2014 года.

Прототип транспортного планетохода
Прототип лунного транспортного вездехода — это небольшой 12-колесный транспортер. Работает от аккумуляторов, заряда которых хватает на две недели работы, и может развивать скорость до 19 км/ч.

Робонавт R1
Работа над первым таким человекоподобным роботом началась в управлении еще в 1997 году. Идея проекта состояла в том, чтобы создать гуманоида, который мог бы помочь космонавтам в выполнении задач, где нужна еще одна пара рук, а также тех, выполнение которых могло быть слишком опасным для астронавтов.
Первой моделью стал робонавт R1, разработанный в двух версиях — R1A и портативный R1B. Он был представлен в 2002 году. И если верхняя его часть оставалась неизменной, то нижняя менялась в зависимости от задач, которые робот должен был выполнять. Так, модификация R1 Zero-G для работы на космической станции имеет одну шарнирную ногу, робот модели R1 RMP, разработанный в 2003 году, вместо ноги имеет два колеса (более поздняя модель — четыре). Такой робонавт участвовал в исследованиях NASA в пустыне.

Робонавт R2
В 2006 году к разработке роботов решила присоединиться компания General Motors, и в феврале 2010 года был представлен робонавт R2. Он в четыре раза быстрее R1, более ловкий и компактный, с сенсорными датчиками на кончиках пальцев. Его грузоподъемность — 18 кг, каждой рукой он может поднять и удерживать до 2,5 кг. Работу андроида обеспечивают 38 процессоров, управляемых членами экипажа в космосе и с Земли.

Рука робонавта модели R2
Изначально планировалось, что робонавт R2 будет испытываться только на Земле, но постепенно он был модифицирован для работы в космосе: заменены материалы обшивки, добавлены дополнительные экраны для уменьшения помех, усовершенствованы процессоры. В феврале 2011 года R2 был доставлен на МКС.
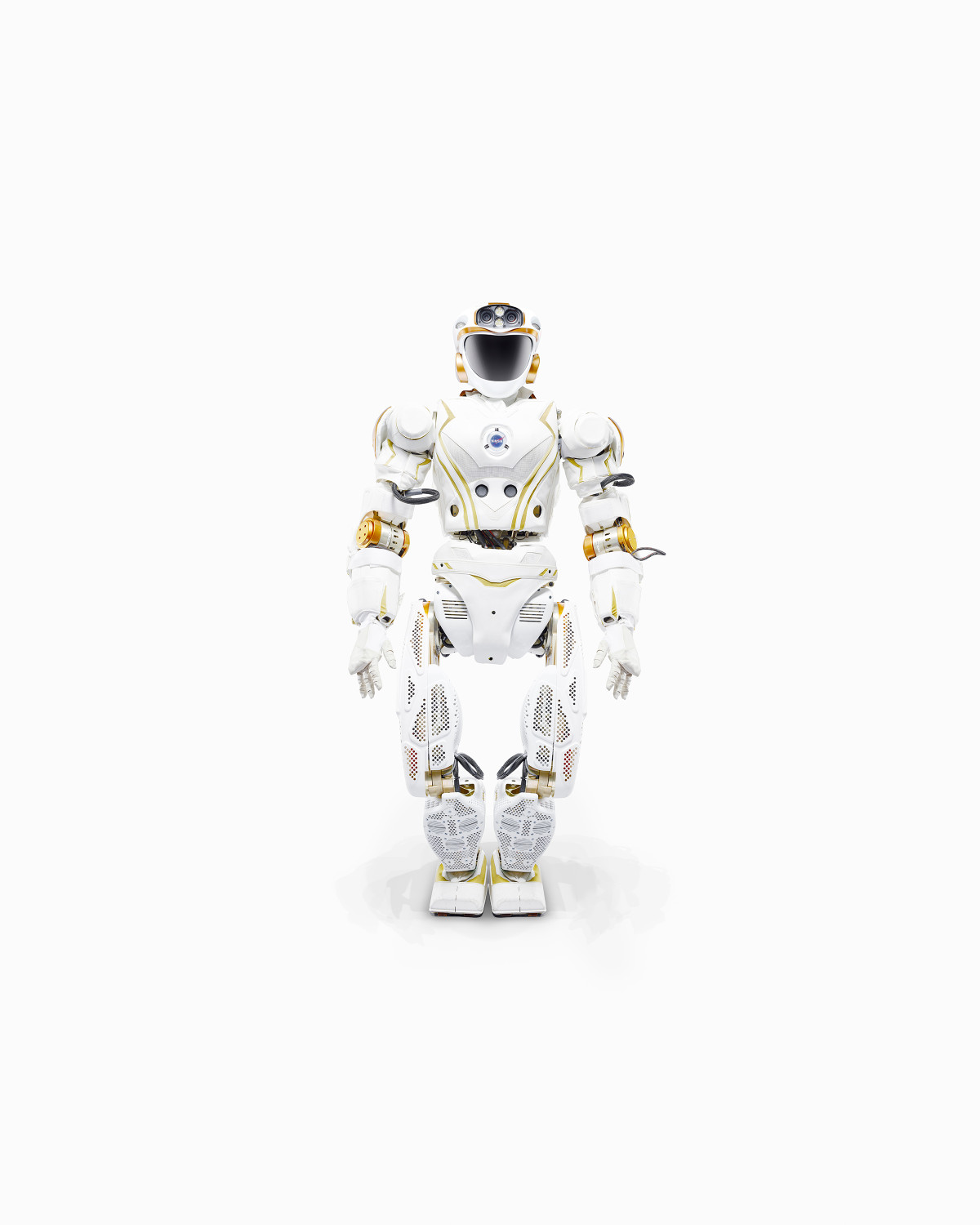
Робонавт «Валькирия» (R5)
Следующее поколение роботов NASA R5, или «Валькирия», было разработано Космическим центром имени Линдона Джонсона для участия в испытаниях Управления перспективных исследовательских проектов Министерства обороны США (DARPA) в 2013 году. R5 был спроектирован за 15 месяцев на основе более ранних моделей робонавтов NASA.
У R5 модифицированы руки с четырьмя пальцами. У него появились передняя и задняя камеры, которые могут предупредить робота о возможной опасности, и автономный источник питания. Торс робота обладает повышенной подвижностью.
- Лучшие космические фото года
- Внеземные города: названы лучшие проекты поселений под водой и в космосе
- SpaceX запустила к Марсу ракету с красной Tesla на борту
- В Минске открылось заседание Исполнительного комитета Ассоциации участников космических полетов
- Космические новости в фотографиях, март 2018 года
